Jesteś krótkofalowcem na 99.9% spotkałeś się z alfabetem Morse’a. Jak zacząć przygodę z CW? Według wielu poradników, szkoleń czy rad doświadczonych telegrafistów najlepiej od nauki odbioru, a dopiero po tym etapie przechodzimy do nauki nadawania. Więcej na temat telegrafii, sposobach jej opanowania :), doskonaleniu się można przeczytać na stronie titawa.pl
Nasze doświadczenie z telegrafią pozwala nam zasugerować by na etapie nauki nadawania wykorzystać manipulator dwudźwigniowy.
Opracowaliśmy dla Was zestaw do samodzielnego montażu do zakupienia w naszym sklepie. Aby zachęcić do samodzielnego składania wersja zmontowana celowo jest droższa 🙂 i trudniej dostępna. Jeżeli z jakiegoś powodu potrzebujesz wersji zmontowanej daj nam znać. Jak sprawdzaliśmy zestawy klocków LEGO również nie są dostępne zmontowane 😉
Facebook
Twitter
LinkedIn
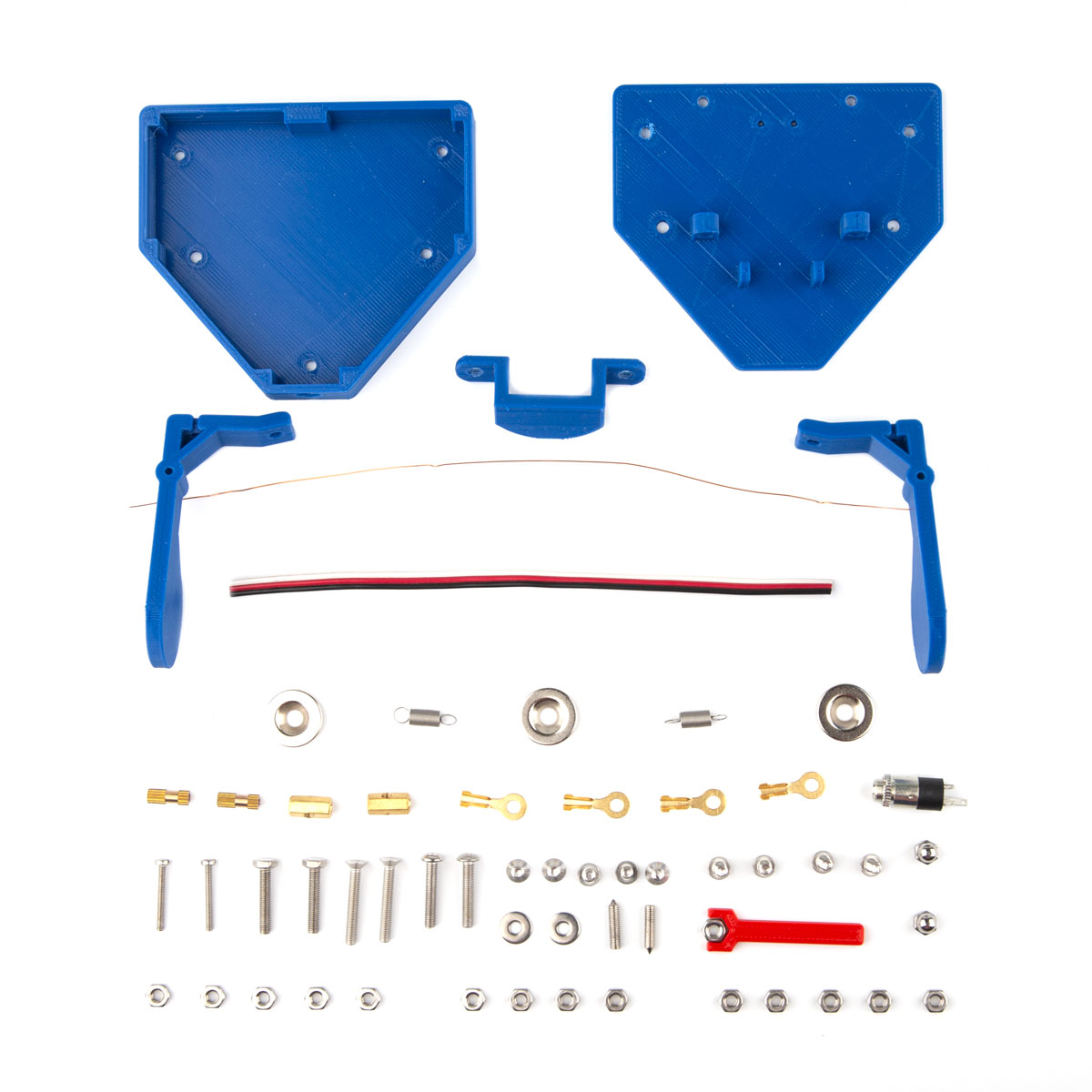
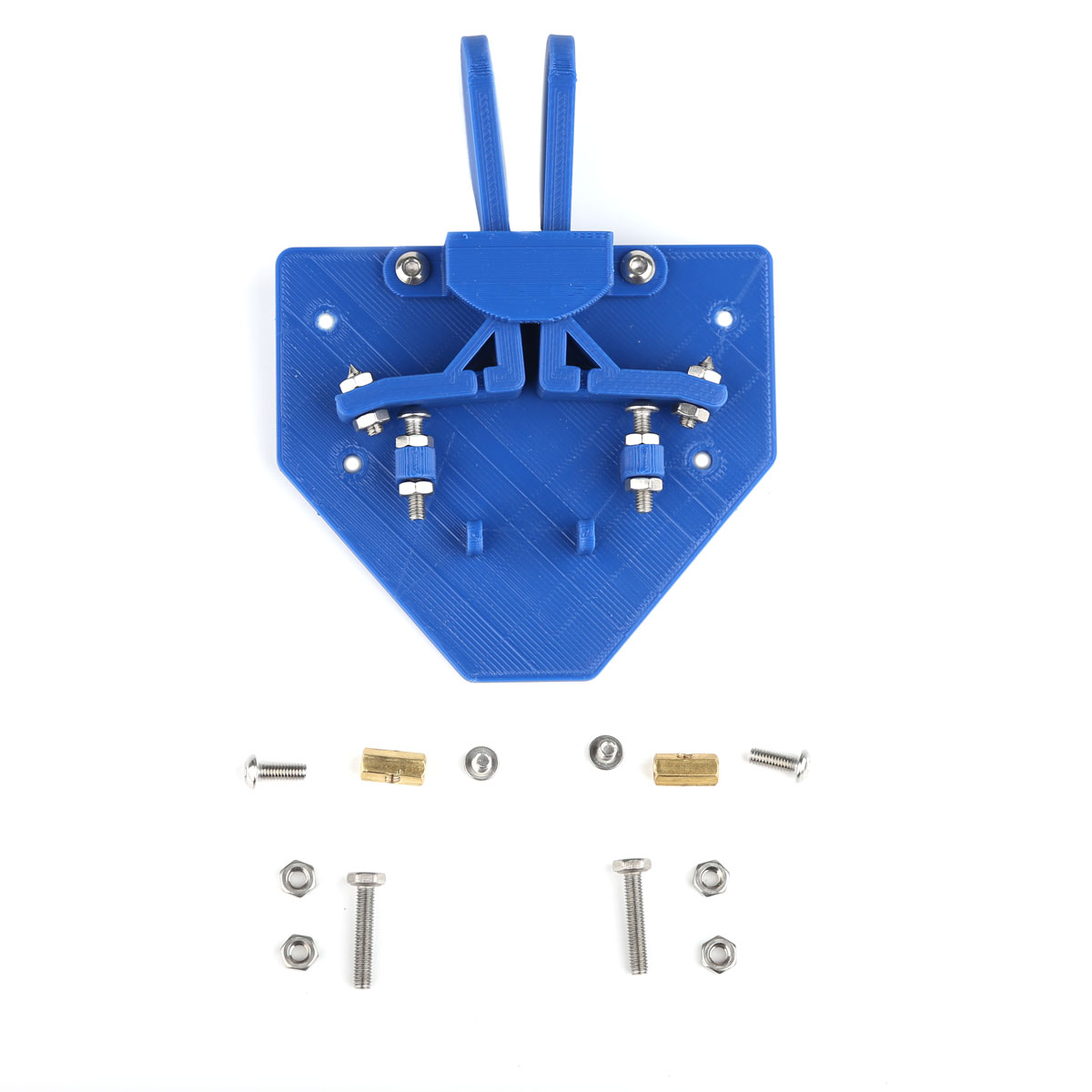
Co w zestawie
W skrócie można by napisać że wszystkie potrzebne części do wykonania funkcjonalnego manipulatora.
wydruki z drukarki 3D
przewody połączeniowe
konektory oczkowe
gniazdo mini jack
elementy mechaniczne
sprężyny
magnesy neodymowe mocowane w podstawie
Montaż zalecamy od sprawdzenia kompletności otrzymanego zestawu. Prace podzielone są na pewne etapy i poza małymi wyjątkami zalecamy zachowanie kolejności montażu.
Instrukcja montażu manipulatora dwudźwigniowego
Etap 1 - przygotowanie łopatek
Montaż rozpoczynamy od przygotowania łopatek. W tym celu musimy przygotować dwa przewody miedziane, docinając je na długość ok. 50 mm, usuwając izolację na końcach. Jedną część przewodu wciskamy razem z mosiężną moletowaną tuleją, która będzie pełniła rolę osi, drugi koniec przewodu prowadzimy kanalikamy i przewlekamy przez otwór na końcu łopaki w który wkręcamy śrubę dociskającą (bez łba) M3x10. Nadmiar przewodu przycinamy. Śrubę dociskającą zabezpieczamy nakrętkami. Przed przystąpieniem do dalszych prac należy się upewnić, że drut nie został uszkodzony i za pomocą multimetru sprawdzić przejście między osią i śruba dociskającą.
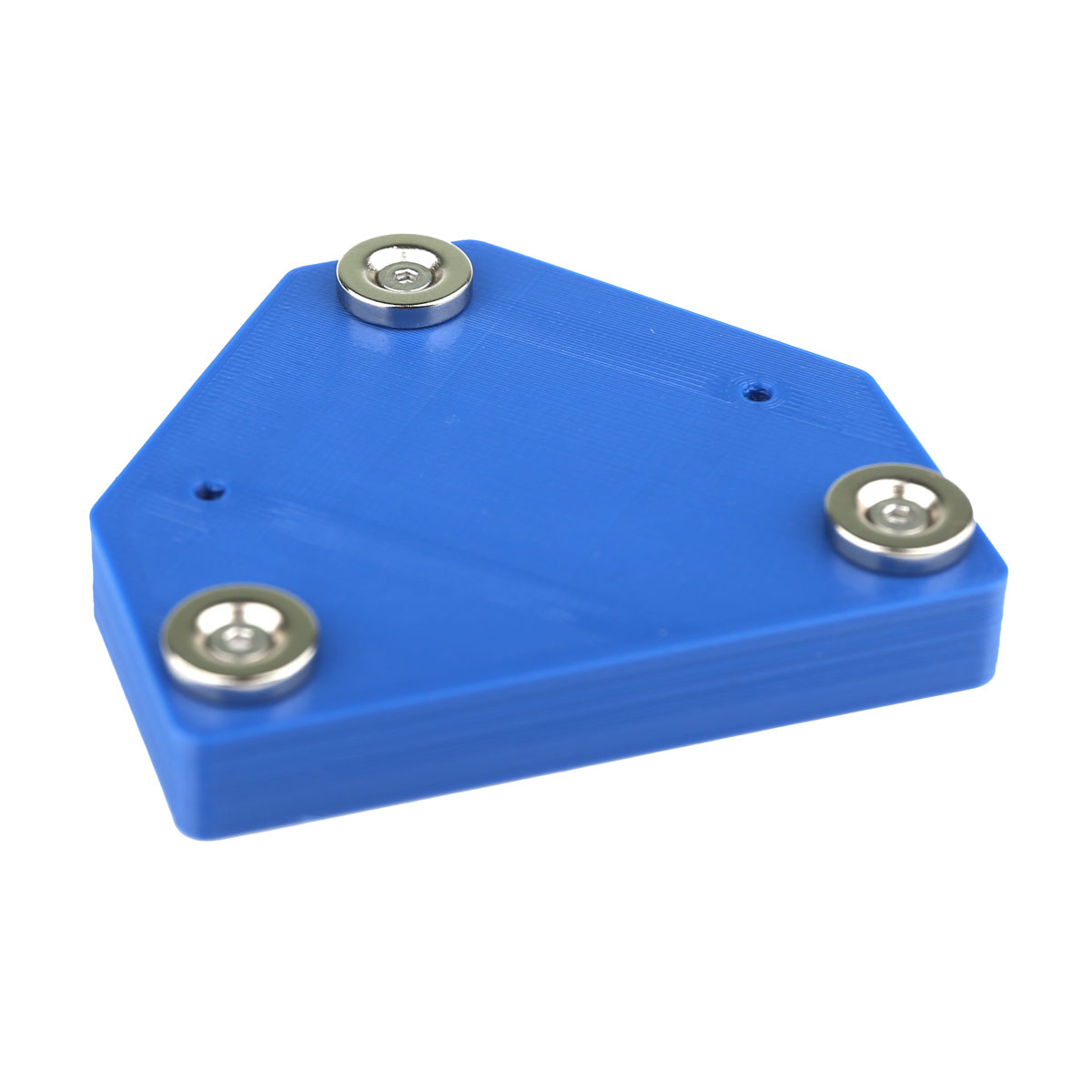
Etap 2 - podstawa do podstawa
Kolejny etap, trochę dla zrelaksowania po pierwszym zegarmistrzowskim etapie montażu łopatek to montaż magnesów w podstawie.
Sam manipulator wykonany w technologii druku 3D jest dość lekki co jest niewątpliwym atutem jeżeli chcemy zabrać go ze sobą na wyprawę w teren.
Montaż magnesów do podstawy manipulatora przy pomocy śrub M3x6. Otwory w podstawie zostały nagwintowane, wystarczy więc śrubę przełożyć przez otwór w magnesie a następnie przykręcić do podstawy manipulatora.
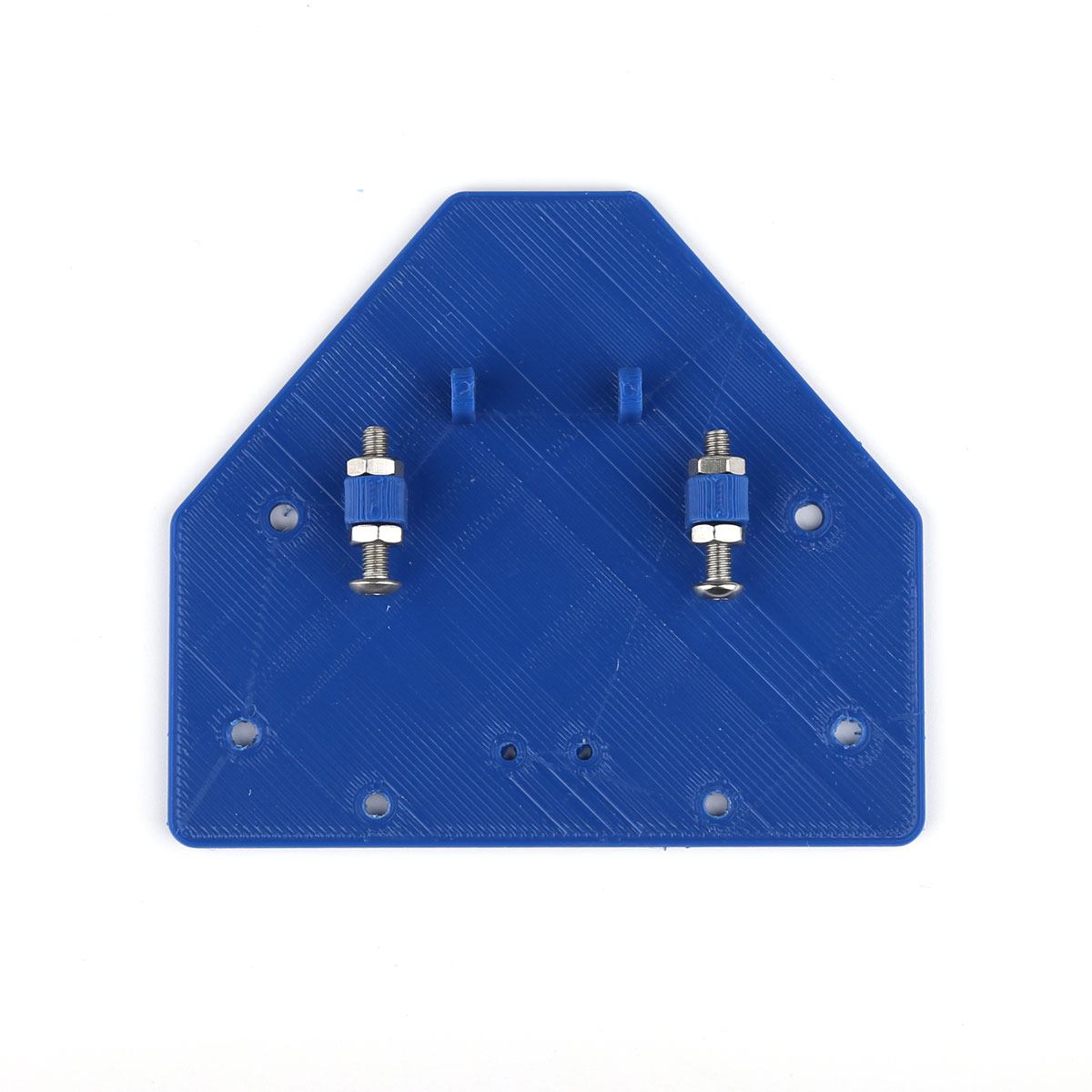
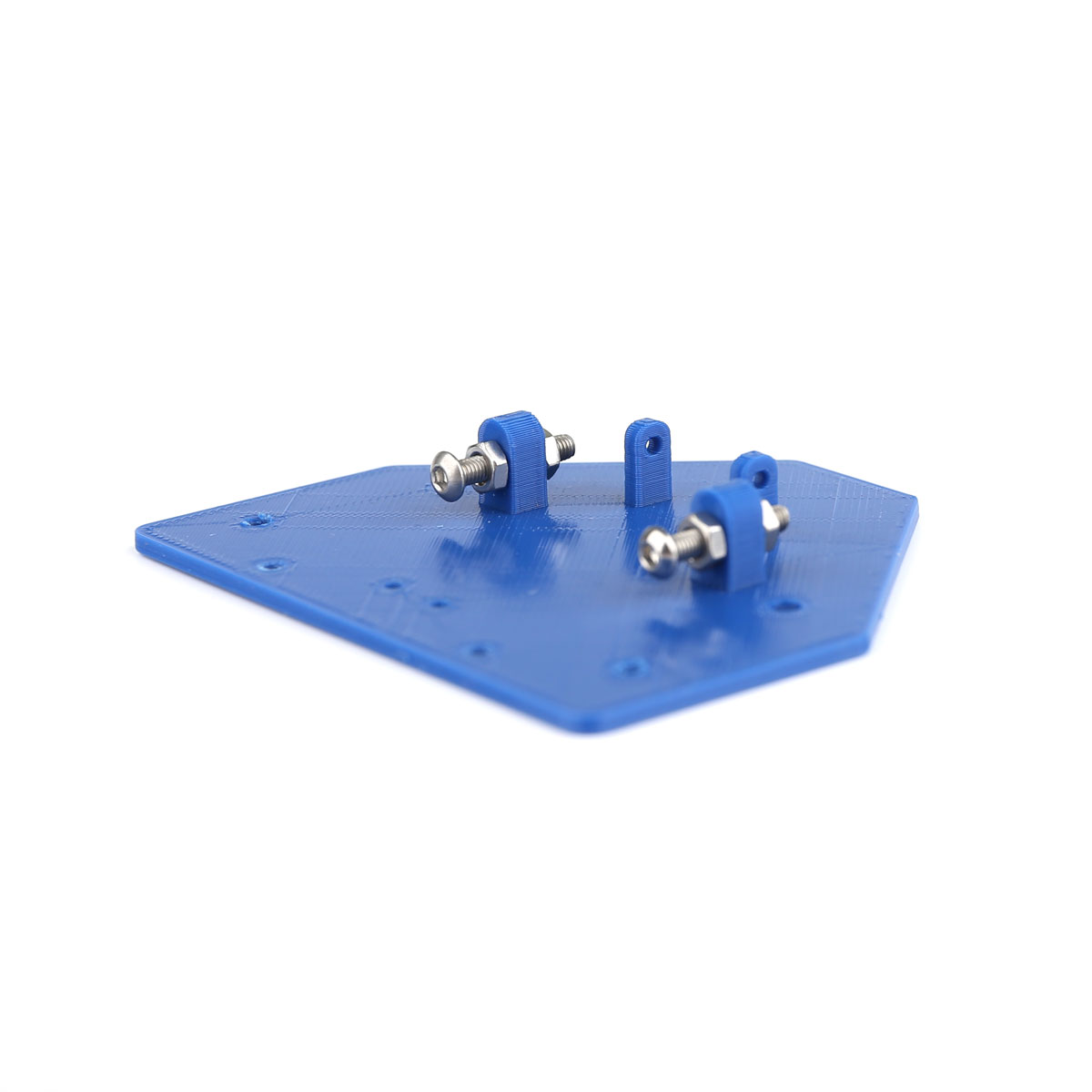
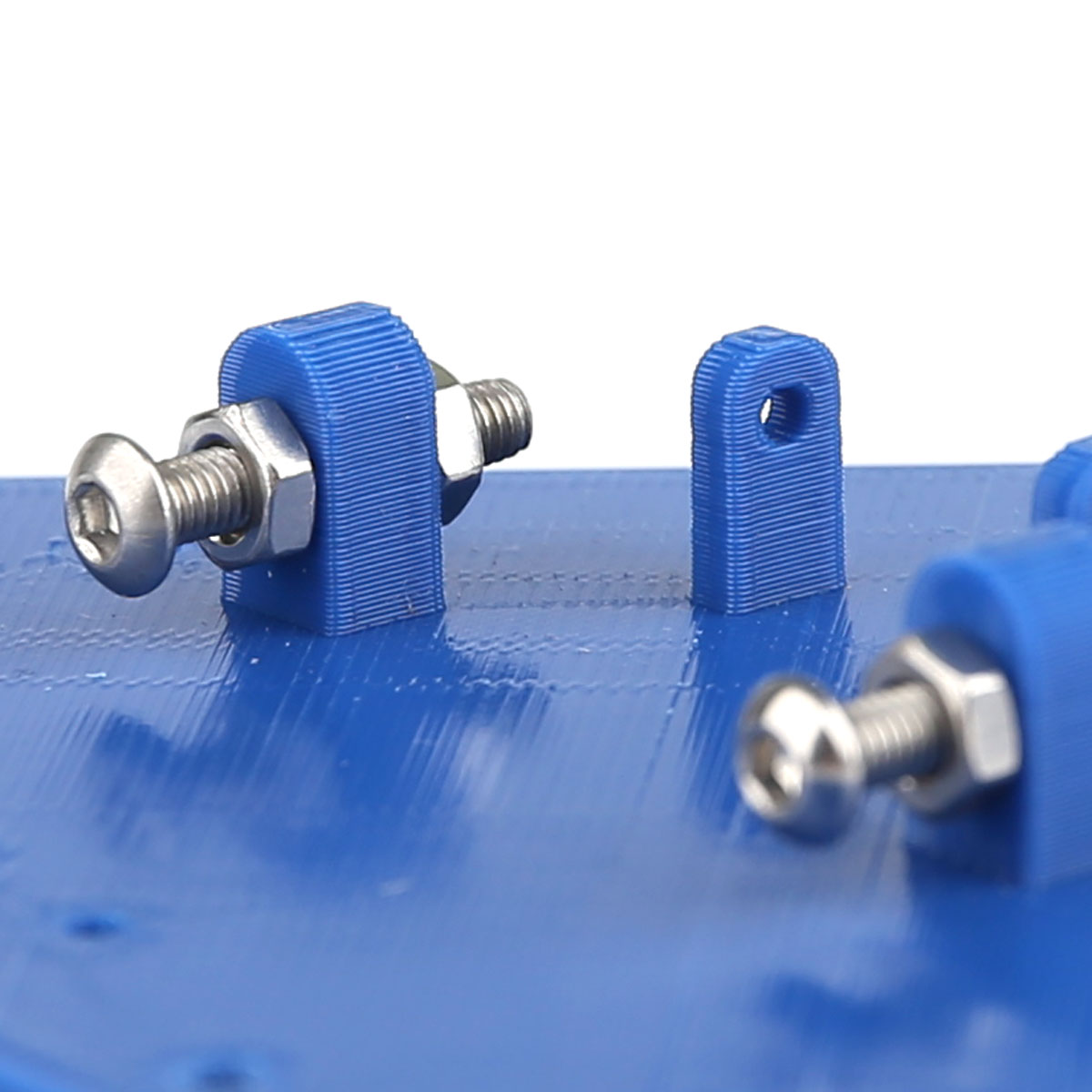
Etap 3 - śruby regulacyjne
Trzeci proponowany przez nas etap montażu to montaż śrub które w przyszłości posłużą nam do regulacji wychylenia pozycji łopatek.
Na śrubę M3x18 nakręcamy jedną nakrętkę, a następnie umieszczamy śrubę w przygotowanych otworach w druku 3D blokując wstępnie drugą nakrętką.
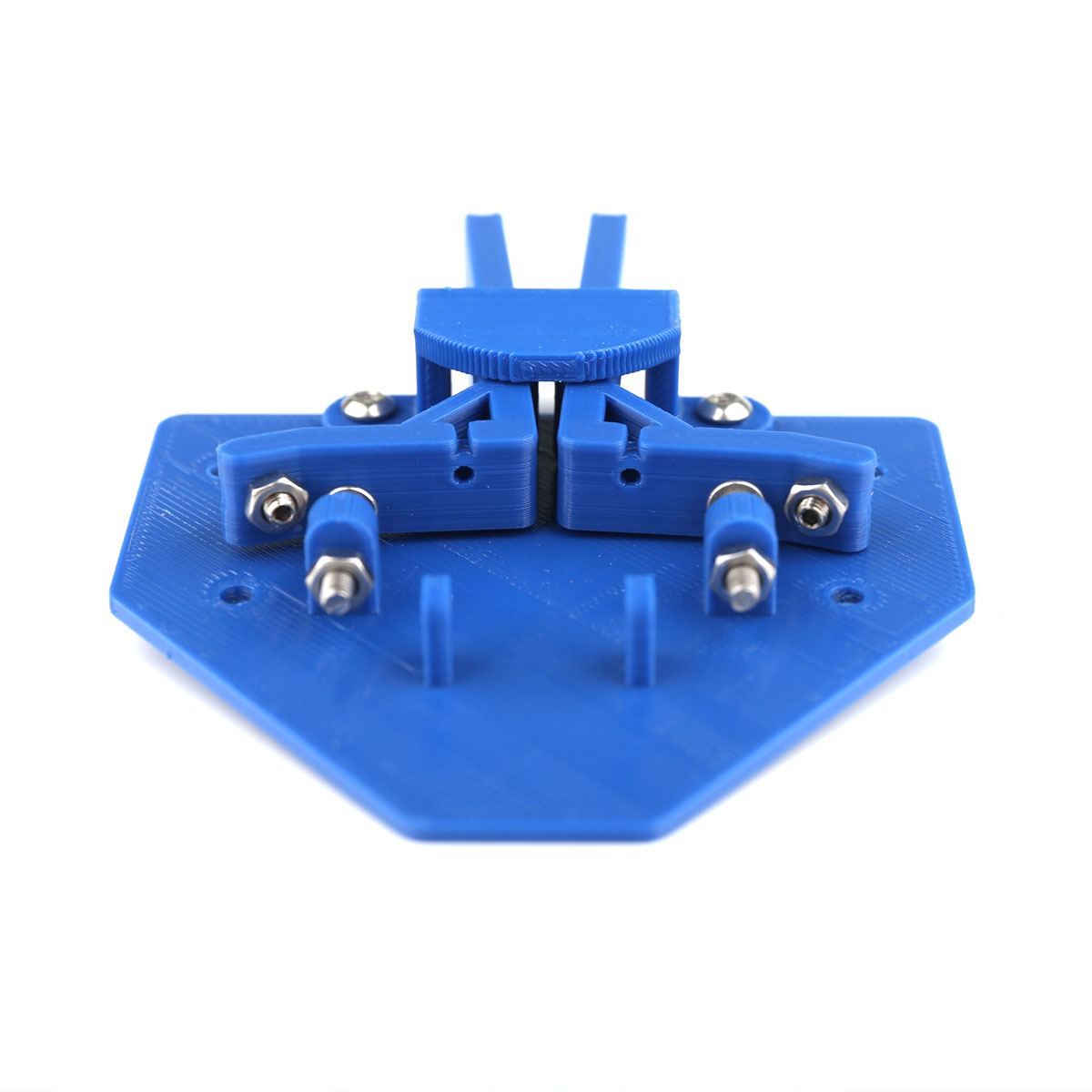
Etap 4 - montaż łopatek
W pierwszym etapie przygotowaliśmy sobie łopatki wypada więc je teraz zamontować.
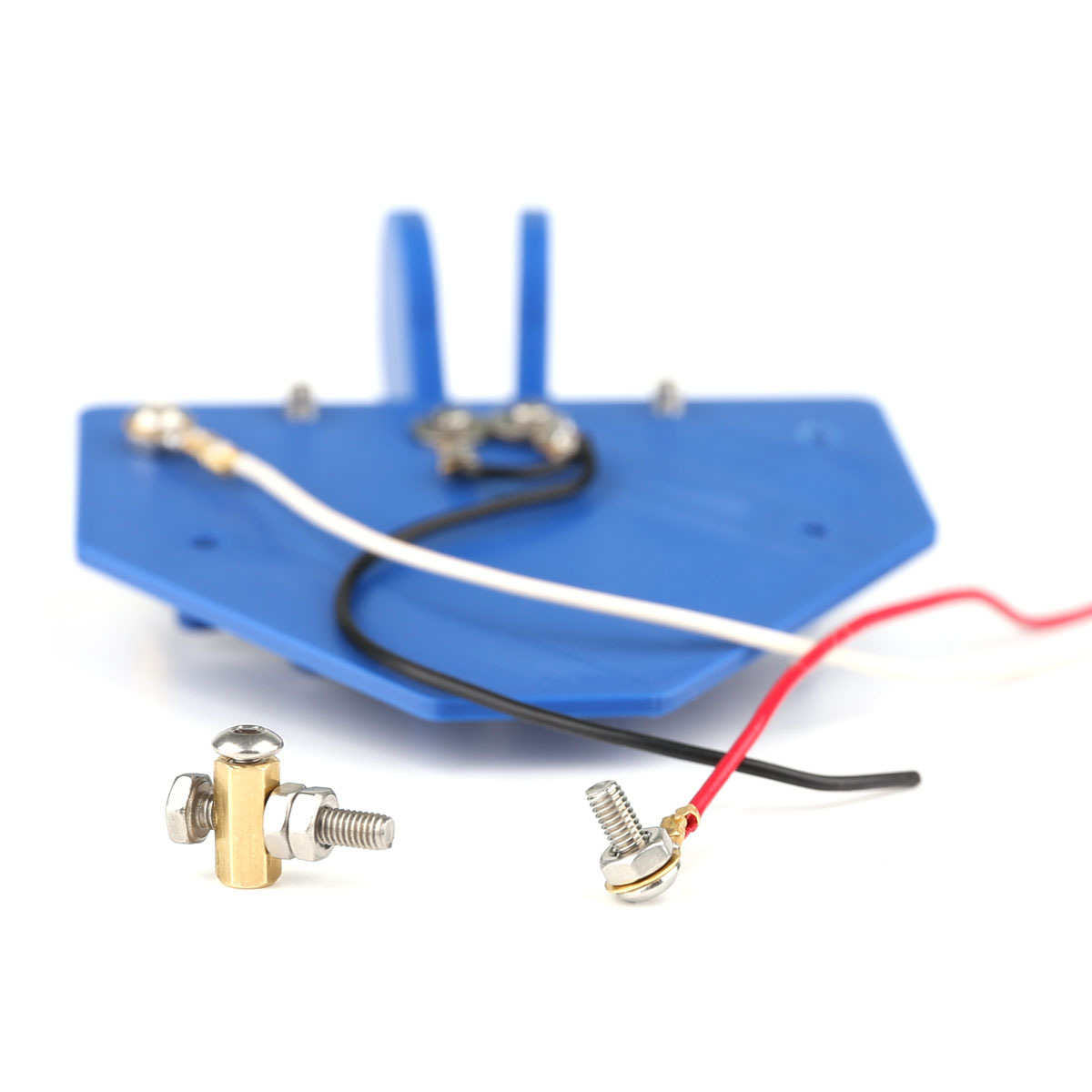
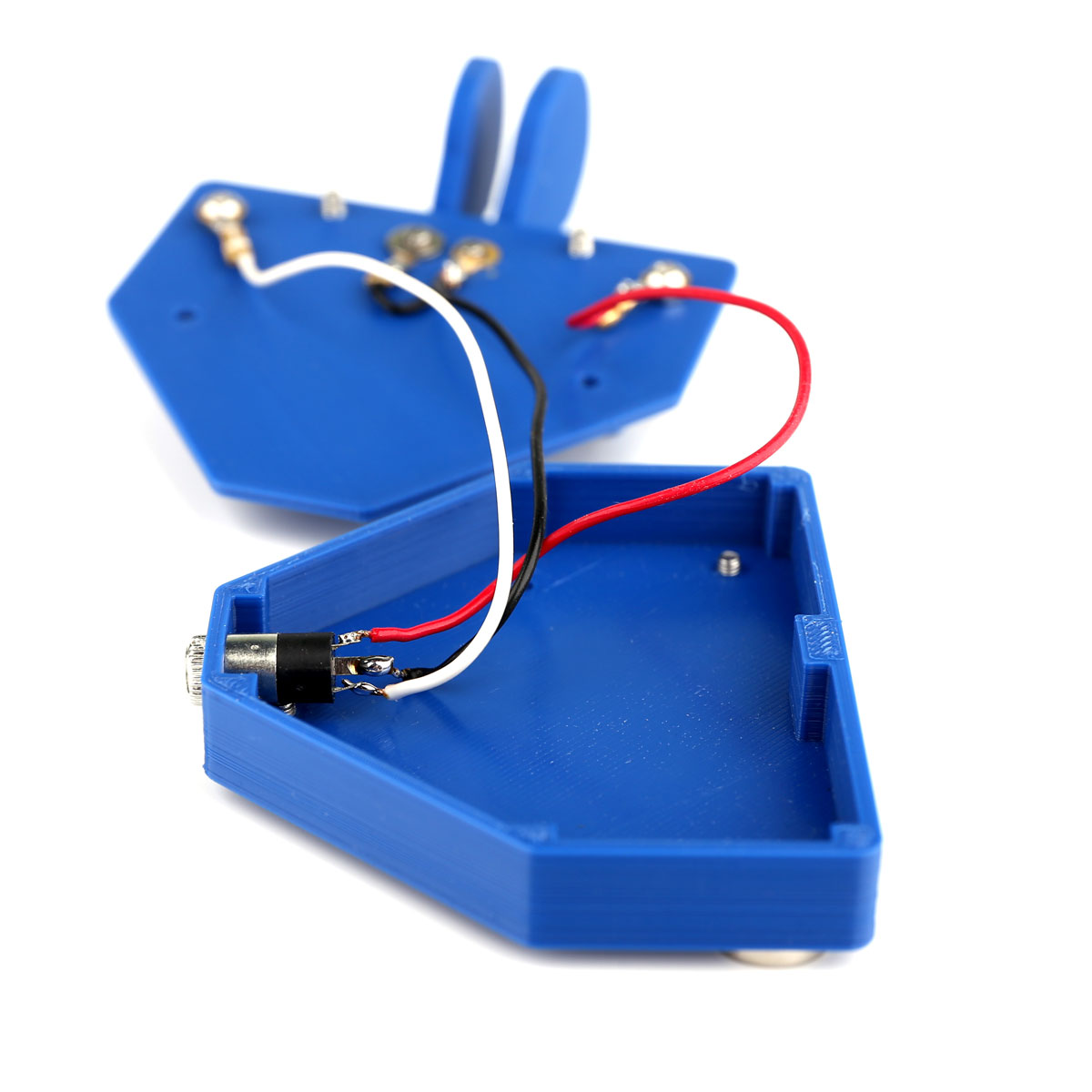
Zgodnie z sugestią na zdjęciach przygotowujemy sobie przewód elektryczny zakończony z jednej strony dwoma konektorami oczkowymi. Drugi koniec przewodu pozostawiamy do dalszego etapu lutowania do gniazda mini jack.
Z zestawu wybieramy śruby M2x17 i zakładamy podkładki oraz konektory oczkowe. Śruby wkręcamy w pokrywę naszego manipulatora od dołu tak by przeszły na górną stronę. Po zrównaniu się z powierzchnią wykonujemy jeszcze 1 – 1.5 obrotu by minimalnie wystawały. Minimalnie wystające śruby będą stanowiły pewien minimalny dystans i w ten sposób dokręcona łopatka nie będzie tarła o pokrywę manipulatora.
Przykładamy i mocujemy łopatki wkręcając śrubę w tulejkę do momentu przejścia na drugą jej stronę. Znów po zrównaniu wkręcamy jeszcze 2 obroty i na tak zamontowane łopatki nakładamy kabłąk dokręcając go do podstawy przy pomocy śrub M3x8
Na koniec dokręcamy śruby M2 i przechodzimy do kolejnego etapu.
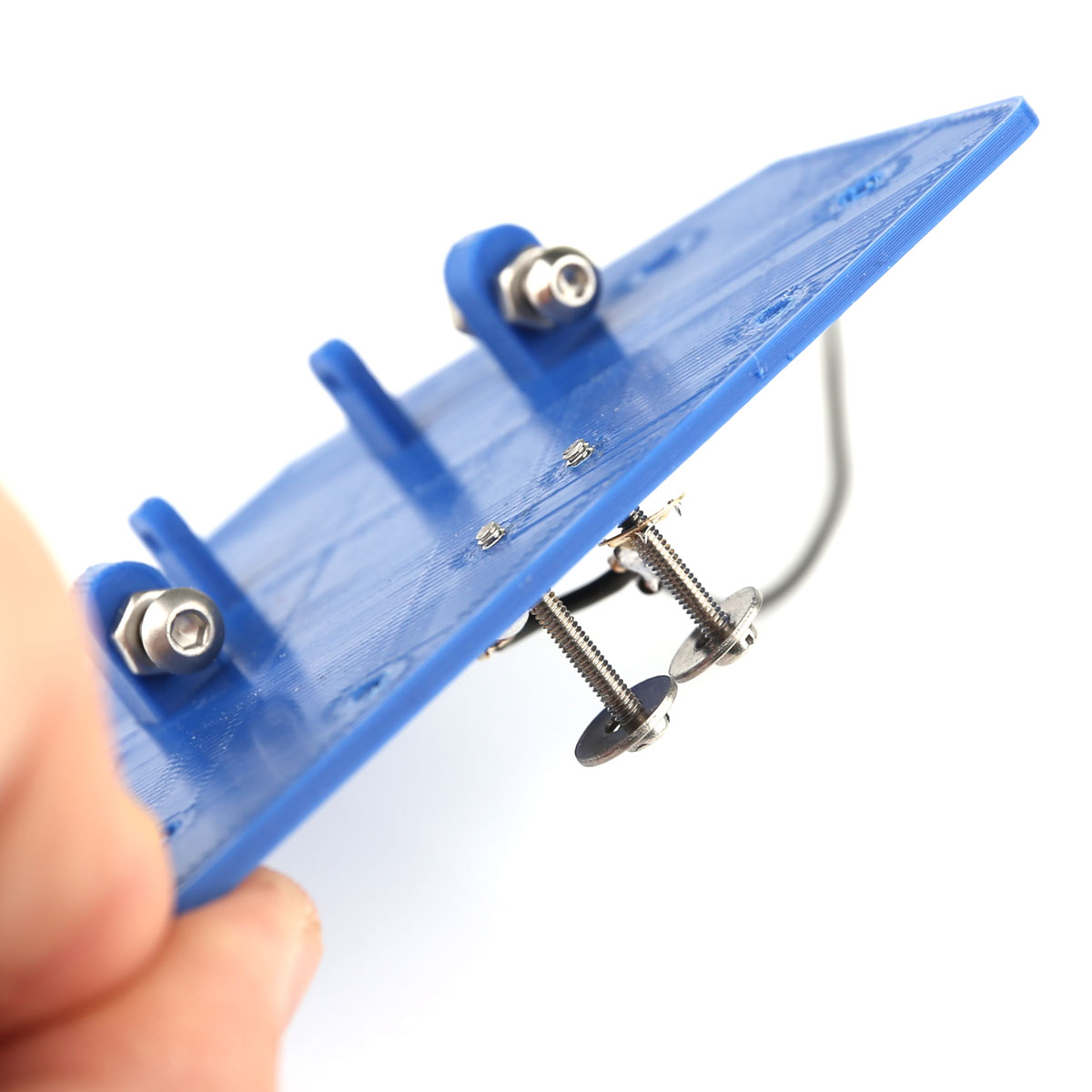
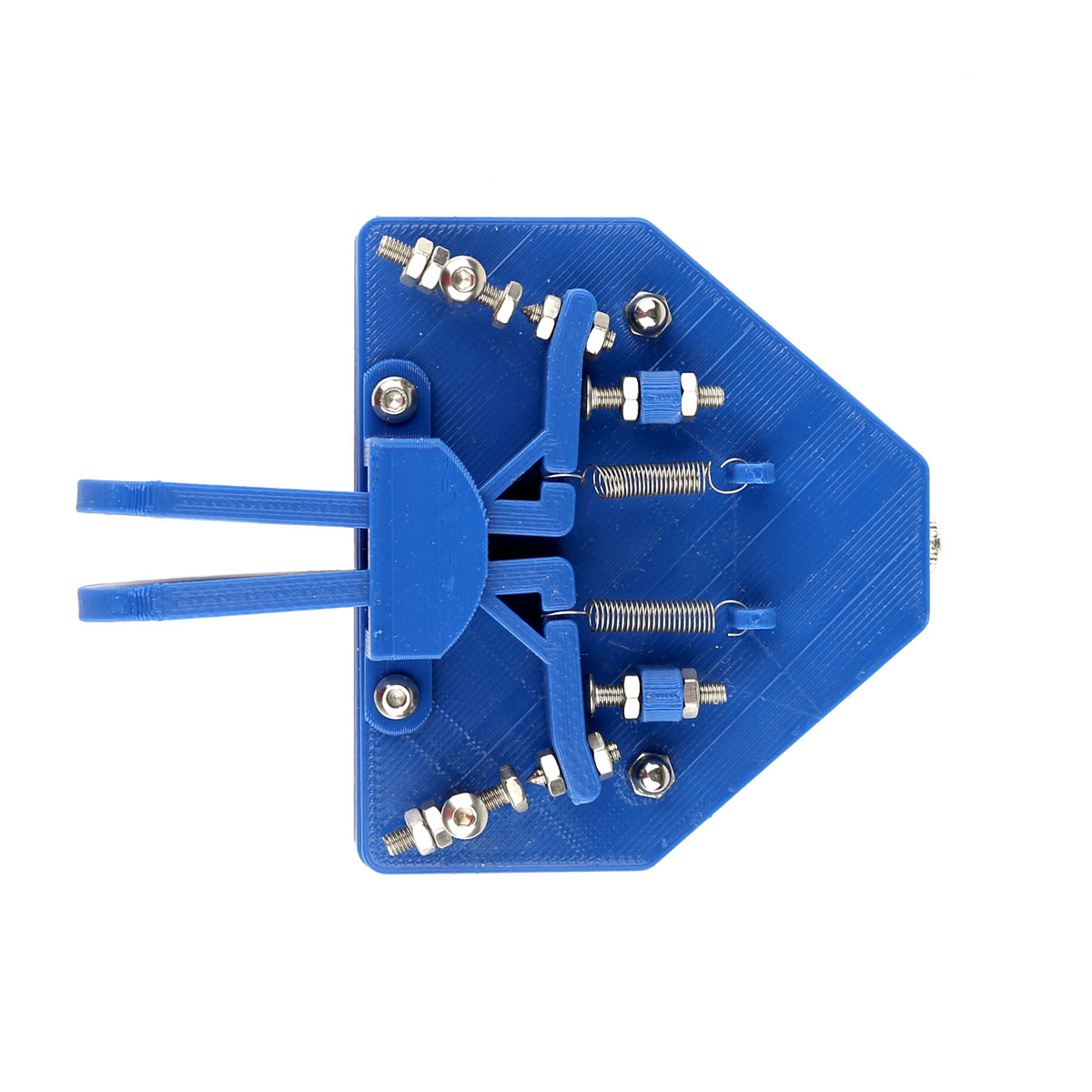
Etap 5 - montaż słupków
Słupki zostały przewiercone i nagwintowane. Montaż należy rozpocząć od wkręcenia śruby M3x18 z płaskim łbem i zablokowaniu wstępnie blokując przy użyciu nakrętek M3. W górna część słupka wkręcamy sruby z łbem kopiastym M3x6 poprawito estetykę i jednoczęnie zaślepia otwory w słupku.
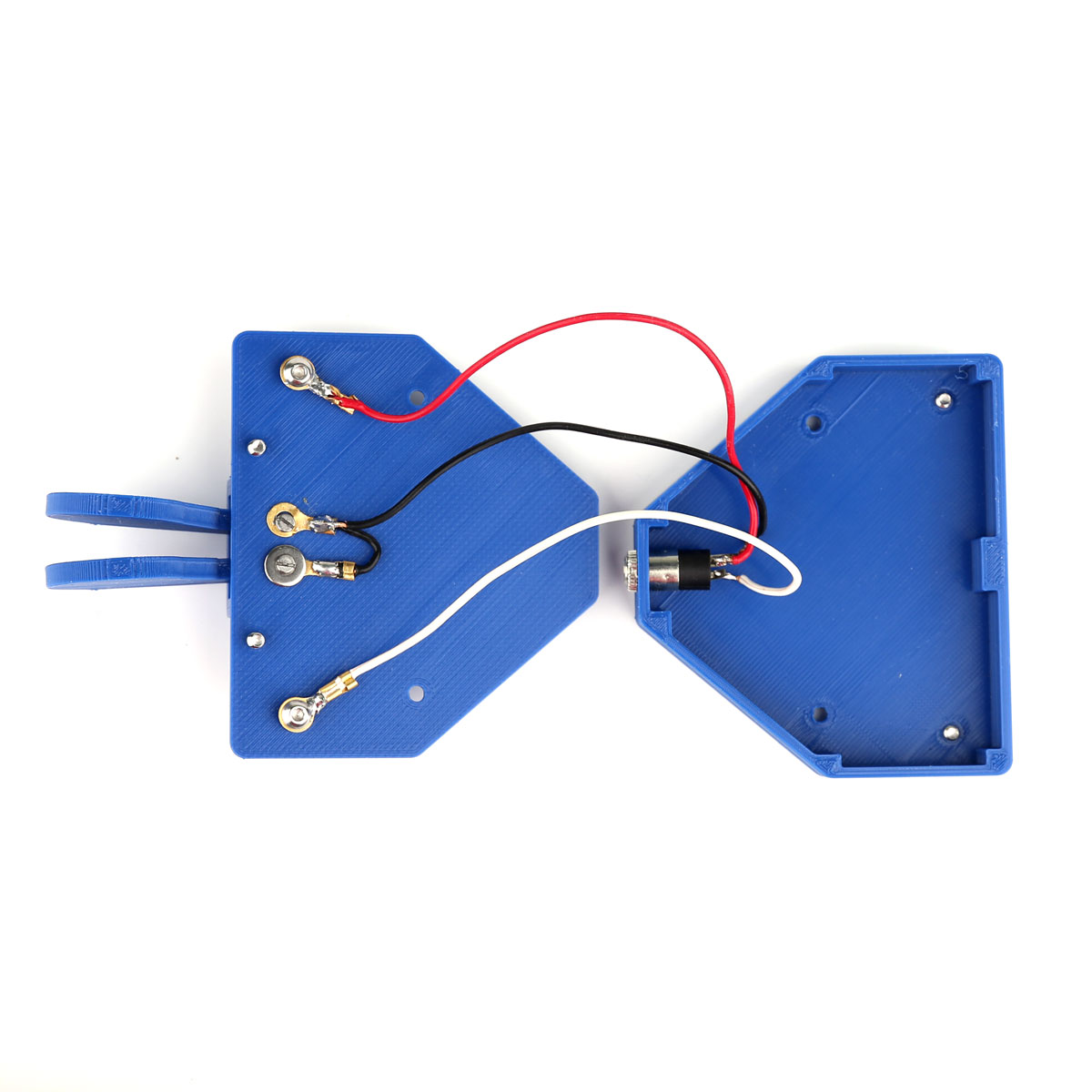
Słupki do manipulatora montujemy za pomocą śrub M3x8 pamiętając by przed wkręceniem tychże śrub nałożyć na nie konektroy oczkowe z odpowiednim przewodem.
Po zamontowaniu słupków zalecamy sprawdzenie przy użyciu multimetru przewodności, przewód – słupek jak i styk łopatek – słupek po zamknięciu odpowiedniego styku. Jeżeli wszystko ok lutujemy i montujemy gniazdo mini jack stereo. Najczęściej w naszych urządzeniach radiowych mamy przykładowe wyprowadzenia na poszczególnych stykach. Warto się do tego zastosować by w odpowiedni sposób przylutować przewody do gniazda. Odpowiednio czyli tak by kropka i kreska była na właściwej łopatce w manipulatorze. W rozmowach z kilkoma kolegami, nadającymi manipulatorem dwudźwigniowym, dostaliśmy informację kropka pod kciukiem czyli dla praworęcznych użytkowników lewa łopatka. Nie jest to jednak tak oczywiste 🙂 i przyzwyczajenia mogą być różne. Oczywiście większość urządzeń nadawczych potrafi odwrócić to połączenie.
W dalszej części zarówno styki w słupkach jak i łopatkach należy wyregulować ustawiając odpowiednie odległości przerwy styków i wychylenia łopatek. Ale to na sam koniec naszej przygody.
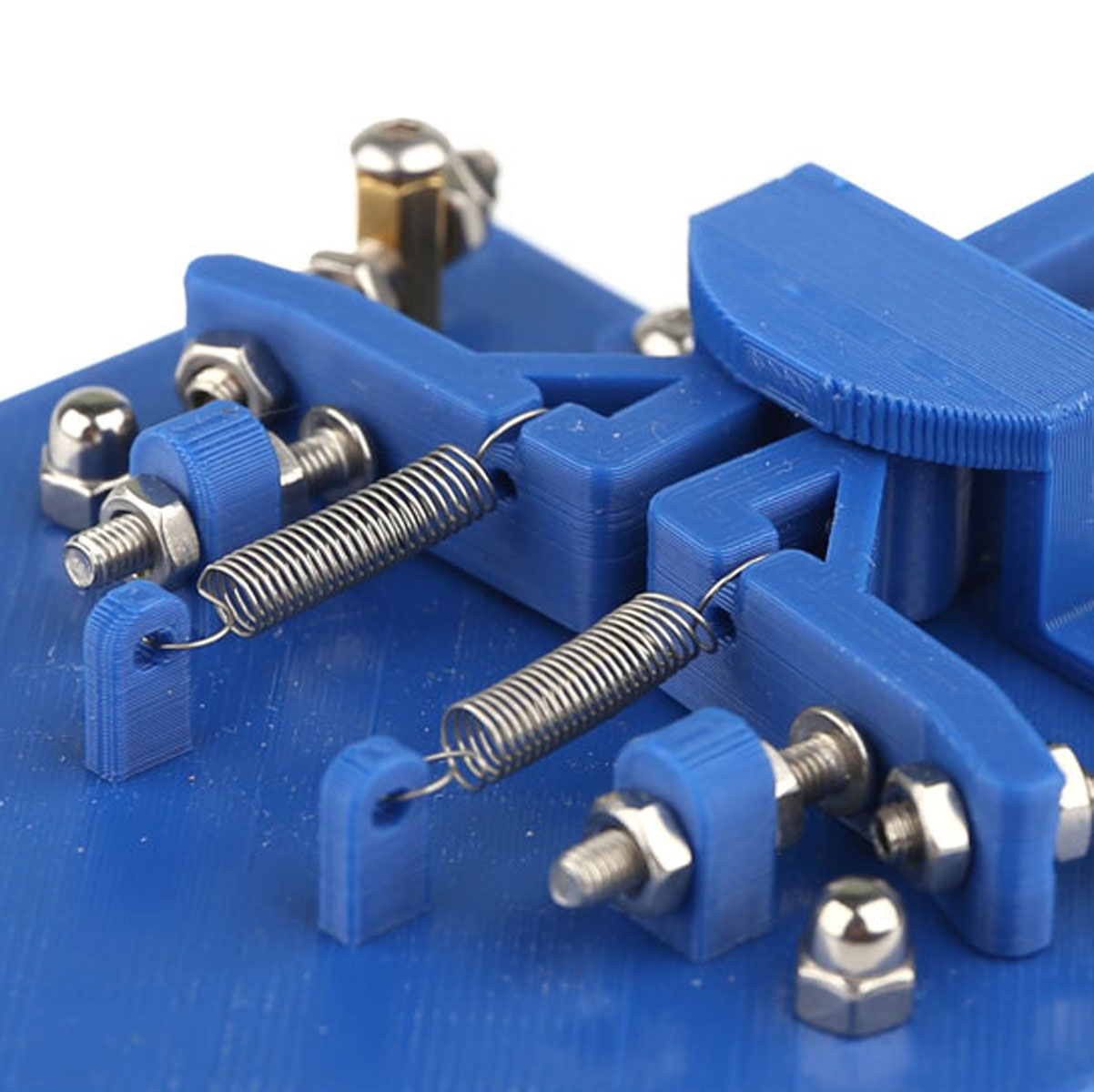
Etap 6- montaż sprężyn
Sprężyny zaczepiamy na łopatkach w otworach pod nacięciami, a następnie naciągamy i drugi koniec zaczepiamy w otworach w słupkach wydrukowanych w przedniej części manipulatora
Etap 7- montaż pokrywy
Jeżeli wszystkie poprzednie etapy zostały wykonane prawidłowo i testy wstępne przebiegły pozytywnie możemy zamykać manipulator skręcając podstawę oraz pokrywę. W tym celu w podstawę wkręcamy śruby M3x20 które po złożeniu podstawy z pokrywą przechodzą na wylot gdzie w górnej części nakręcamy nakrętki kołpakowe uważając by nie przyciąć przewodów 🙂
Etap 8- regulacja
Regulacja manipulatora. Możemy jedynie zasugerować by regulację rozpocząć od ustawienia równoległości łopatek. Uzyskujemy taki efekt poprzez odpowiednie ustawienie śrub ogranicznika wychylenia po stronie sprężyn naciągających. Kolejny element regulacyjny to odległość pomiędzy łopatkami a stykami w słupkach. Odległość z obserwacji i opinii testujących są różne i mocno zależą od upodobań użytkownika końcowego.
To już ostatni etap życzymy udanych łączności. Oczywiście dużo DX-ów ale i ciekawych lokalnych rozmów na ulubionym paśmie. Rozpoczynasz przygodę z CW niech nasz manipulator będzie przydatny w procesie nauki nadawania 🙂
73 Radiohobby
Ta strona korzysta z ciasteczek aby świadczyć usługi na najwyższym poziomie. Dalsze korzystanie ze strony oznacza, że zgadzasz się na ich użycie.